robotteam@mail.ru

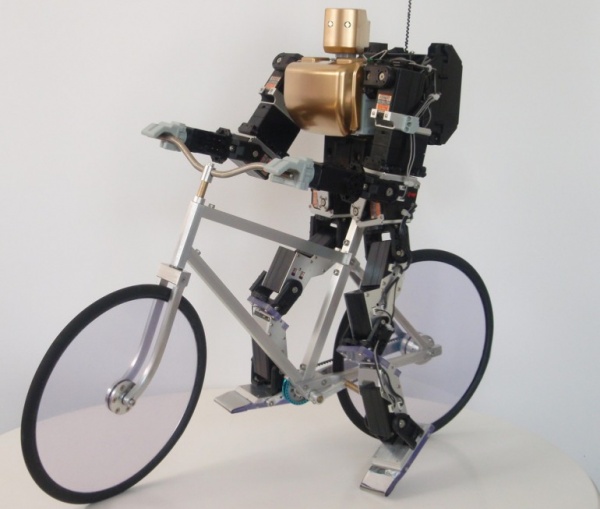 Поездка на велосипеде может быть очень сложной задачей даже для человека. Но вид миниатюрного робота на столь же миниатюрном велосипеде с дистанционным управлением, построенным изобретателем Masahiko Yamaguchi, оставляют очень интересные ощущения. «Я интересуюсь искусственным интеллектом, и в этом контексте, я думаю, интеллект и навыки имеют равную ценность» рассказал Yamaguchi. «Таким образом, я решил рассмотреть езду на велосипеде, как умение, и построить велосипед для робота." Робот крутит педали своими ногами, он сохраняет свой баланс регулируя руль по мере необходимости. Чтобы следить за наклоном велосипеда и корректировать его чтобы не упасть, Yamaguchi сделал систему управления с применением гироскопа. Пропорционально-интегрально-дифференциальный регулятор (PID) управляет балансом действий робота. «PID-регулятор является классическим методом контроля. Он используется для расчета угла поворота руля с учетом наклонов. Кроме того, робот должен решить, в каком направлении двигаться, поэтому мы используем пульт дистанционного управления, чтобы направлять его» объяснил Yamaguch. Так как мини-велосипед не имеет тормозов (велосипед имеет фиксированную передачу), при команде на остановку робот уберет ноги с педалей и поставит их на землю. «С этого момента, я хотел бы совместить это умение робота с его интеллектом. Лично мне не хотелось управлять роботом с помощью пульта дистанционного управления. Я хотел бы сделать робота достаточно умным, чтобы он ездил сам по себе. Эта система является первым шагом к этому.»
|
НовостиСтатьи |